NemoClaw 架構拆解:NVIDIA 怎麼把龍蝦鎖進三層安全堡壘

NemoClaw 架構拆解
相關資源:
- NVIDIA/NemoClaw — 主 repo(Apache 2.0)
- NVIDIA/OpenShell — 底層 sandbox runtime
- NVIDIA Agent Toolkit — NemoClaw 所屬的工具生態
NemoClaw 的底層:不是「包一層 Docker」,是一整個 K3s Cluster
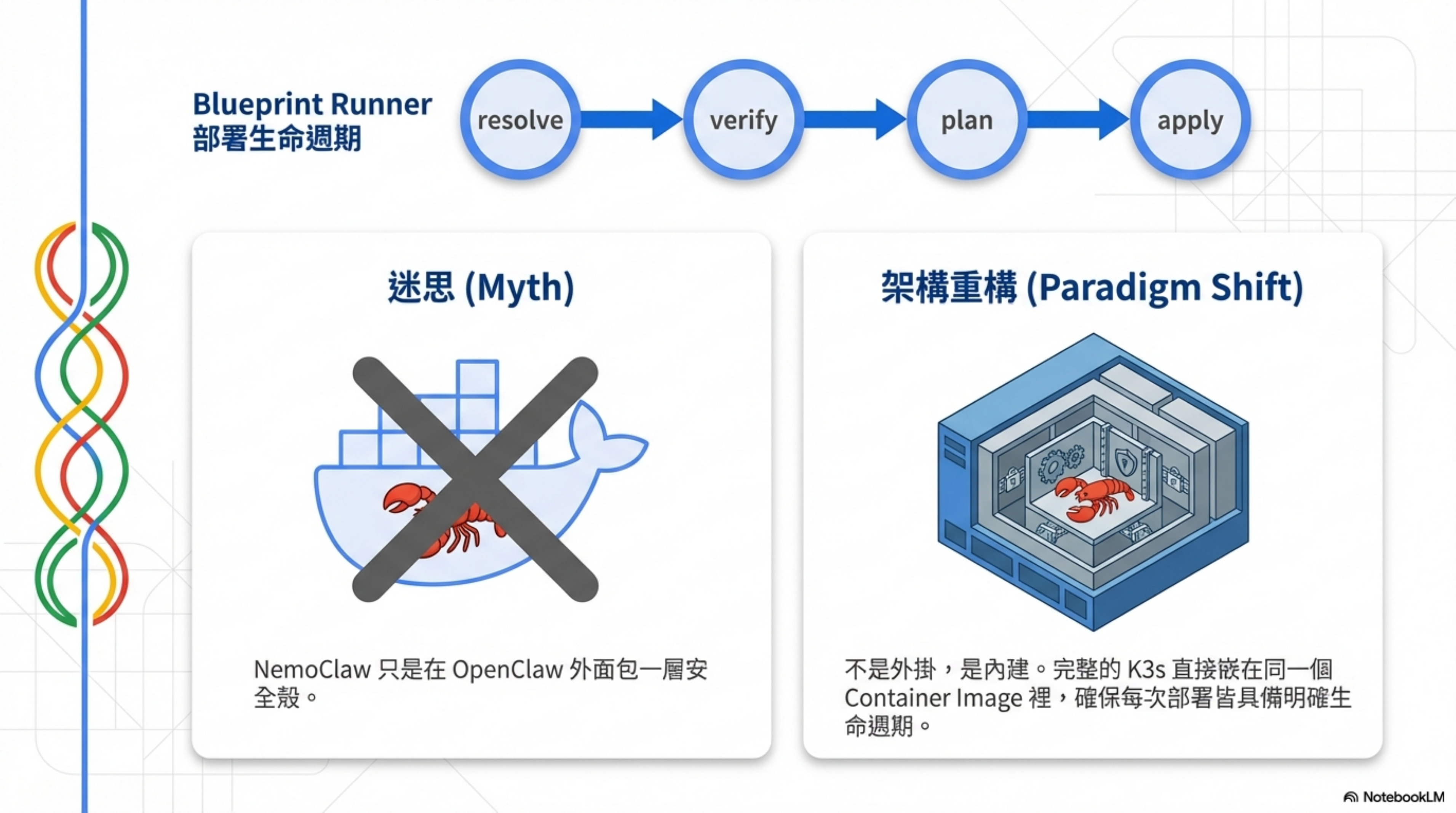
很多人聽到 NemoClaw 以為只是「OpenClaw 外面包一層安全殼」。不是。
先說結論:NemoClaw 是把原版龍蝦裝進一個 K3s 控制的 Sandbox 裡面跑。 K3s 不是外掛,是直接嵌在同一個 container image 裡。啟動時走 Blueprint Runner 的 resolve → verify → plan → apply 四個階段,確保每次部署都有明確的生命週期。
這跟你自己用 Docker 跑 OpenClaw 完全是兩回事。
三個核心元件,完全隔離
K3s cluster 裡面跑三個核心元件:
| 元件 | 職責 | 位置 |
|---|---|---|
| Gateway API | Control plane,協調一切 | K3s cluster 內 |
| Policy Engine | 管理所有安全 policy | K3s cluster 內 |
| Privacy Router | 攔截所有往外部 LLM 的 inference 請求,路由至 NVIDIA NIM 或本地 vLLM | K3s cluster 內 |
Agent 本身呢?跑在獨立的 Sandbox Pod 裡,跟這三個元件完全隔開。
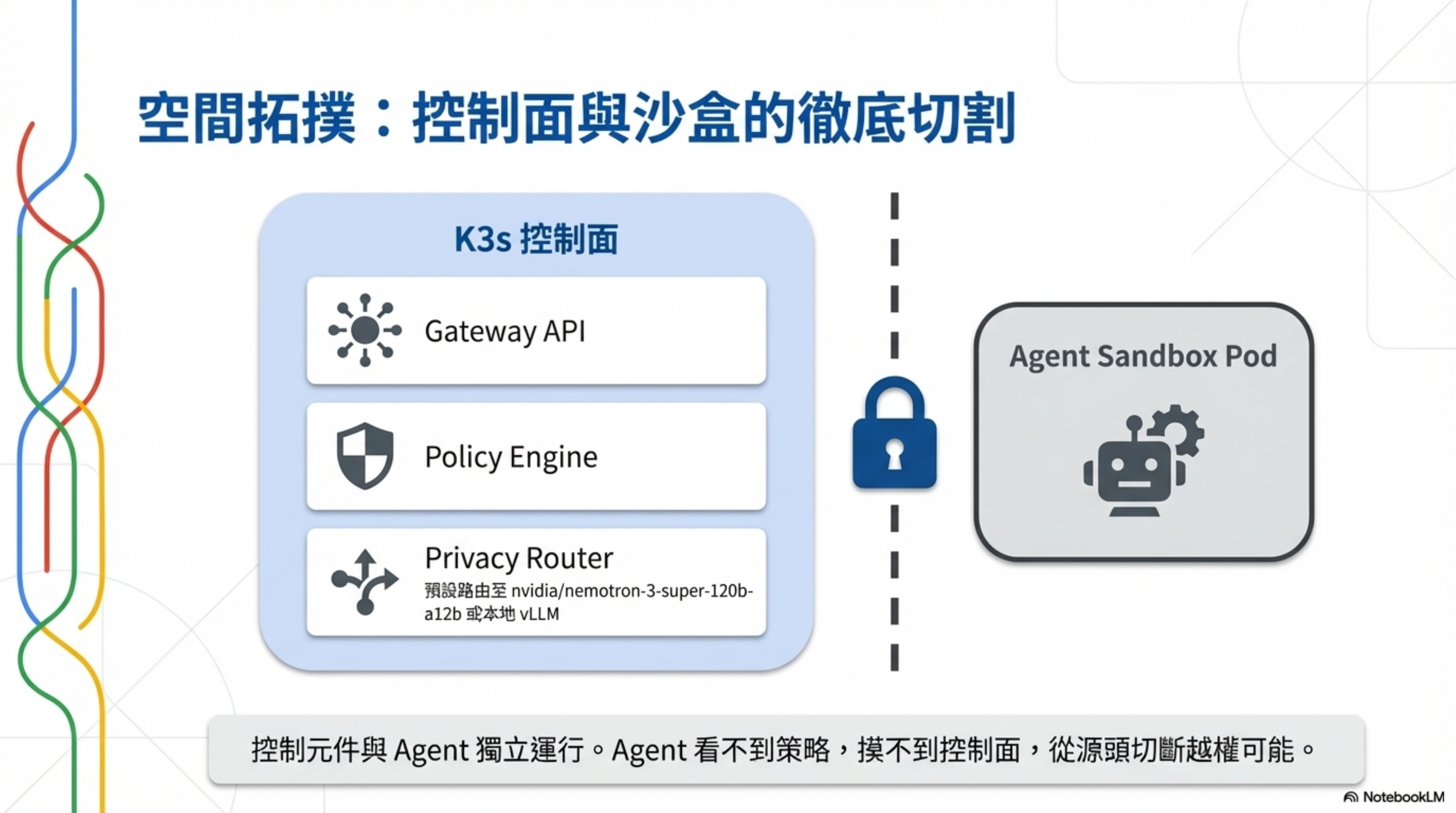
這個設計很關鍵:Agent 看不到 Policy Engine 的資料,摸不到 Gateway API 的控制面。就算 Agent 被 prompt injection 攻破了,它能做的事情被三層安全機制鎖死。
安全三層:各自獨立,互相強化
這是 NemoClaw 最值得看的地方。三層安全機制,每一層獨立運作,任何一層被繞過,另外兩層還在。
第一層:網路隔離(netns + HTTP CONNECT proxy + OPA Policy)
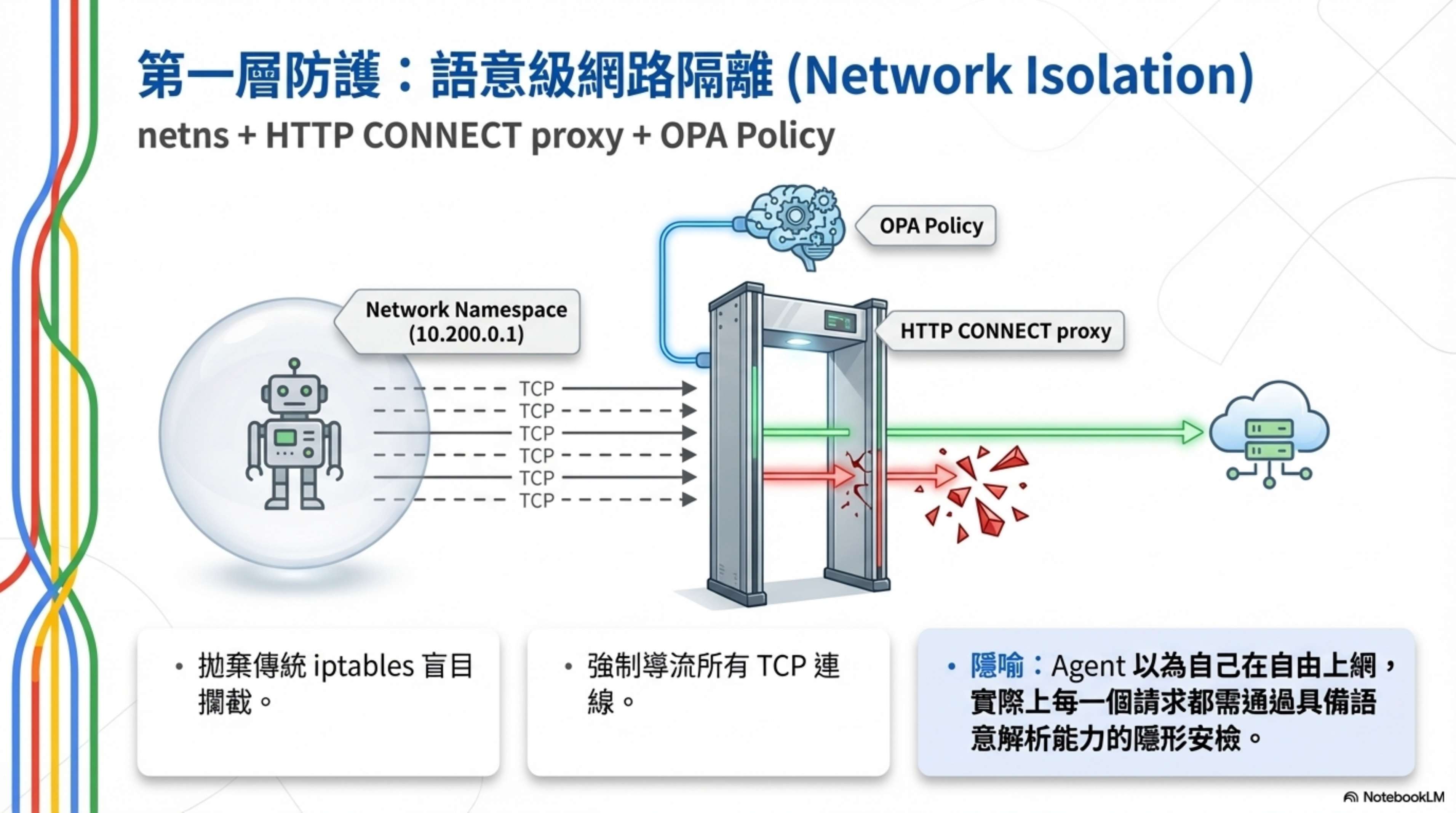
每個 sandbox pod 有獨立的 network namespace(veth pair: 10.200.0.1 ↔ 10.200.0.2)。Agent 發出的所有 TCP 連線都被強制導向 HTTP CONNECT proxy,再由 OPA(Open Policy Agent) 進行應用層的 policy 判斷。
這比傳統的 iptables 規則更強——不只是網路層的 allow/deny,而是可以根據請求的目標 URL、binary 來源等做語意級別的存取控制。
Agent 層面完全感知不到,也沒有辦法繞過——因為 netns 本身就是隔離的網路視角,Agent 看不到 host 的網路介面。
白話講:Agent 以為自己在上網,其實每個請求都經過一個懂規則的安檢門。
第二層:系統呼叫封鎖(seccomp BPF)
seccomp BPF filter 在 sandbox pod 建立時套用,之後直接鎖死。具體來說,filter 是在 child process 的 pre_exec(fork() 之後、exec() 之前)階段套用,套用後不可變更。
這個 filter 宣告的是 allowlist 模式——針對有安全疑慮的 syscall 封鎖,而且可以針對同一個 syscall 的不同參數做精細控制。
白話講:Agent 能呼叫的作業系統功能被列清單管控,清單之外的一律拒絕。

第三層:檔案系統(Landlock LSM)
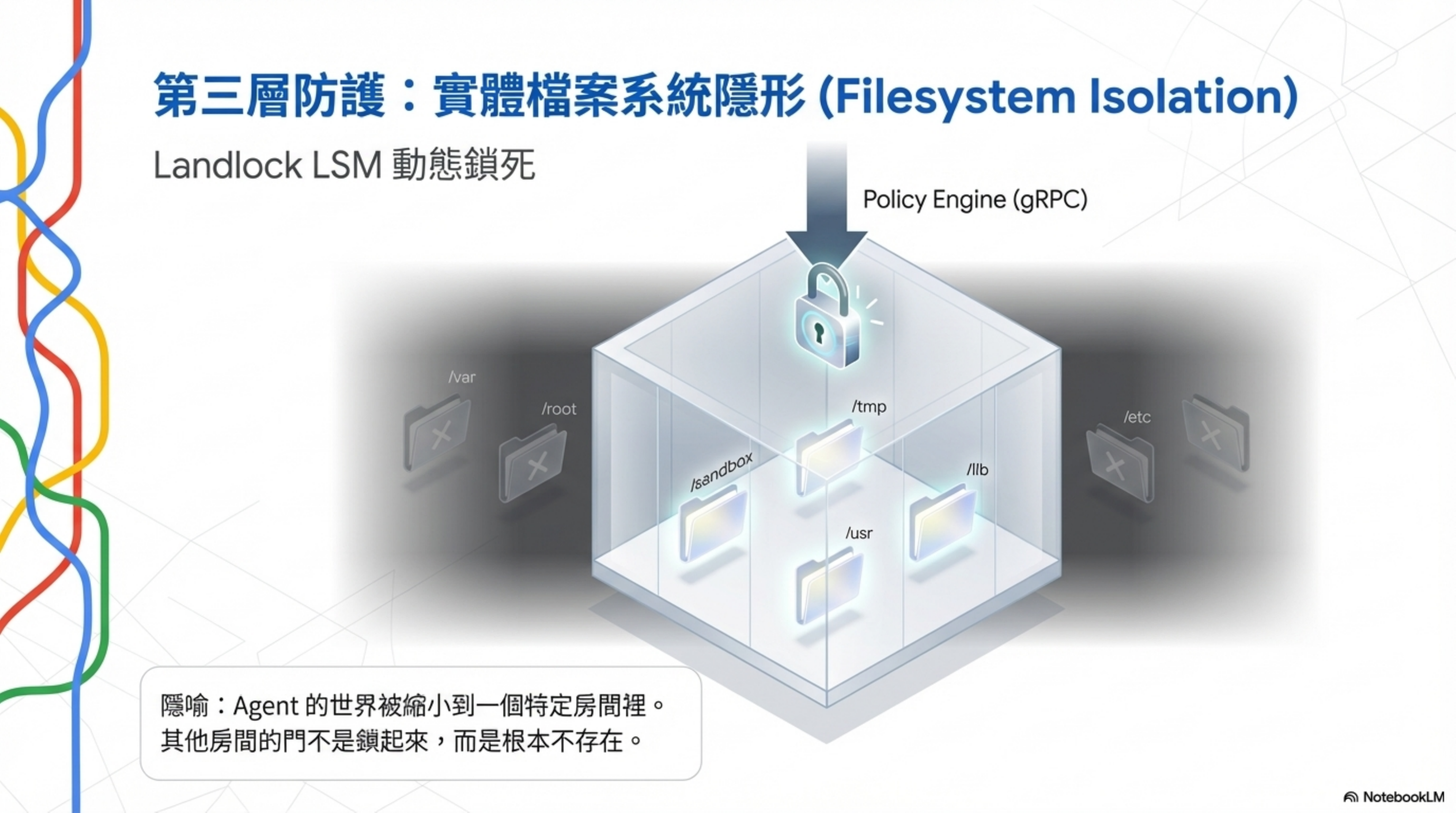
Landlock 是 Linux Security Module。openshell-sandbox supervisor 在 sandbox 啟動時透過 gRPC 向 Policy Engine 動態拿 Landlock policy,套用之後鎖死,無法修改。
可讀寫的路徑只有:/sandbox、/tmp、/usr、/lib、/etc 這些系統路徑。其他路徑對 Agent 完全不可見。
白話講:Agent 的世界被縮小到一個房間裡,其他房間的門不是鎖起來——是根本不存在。
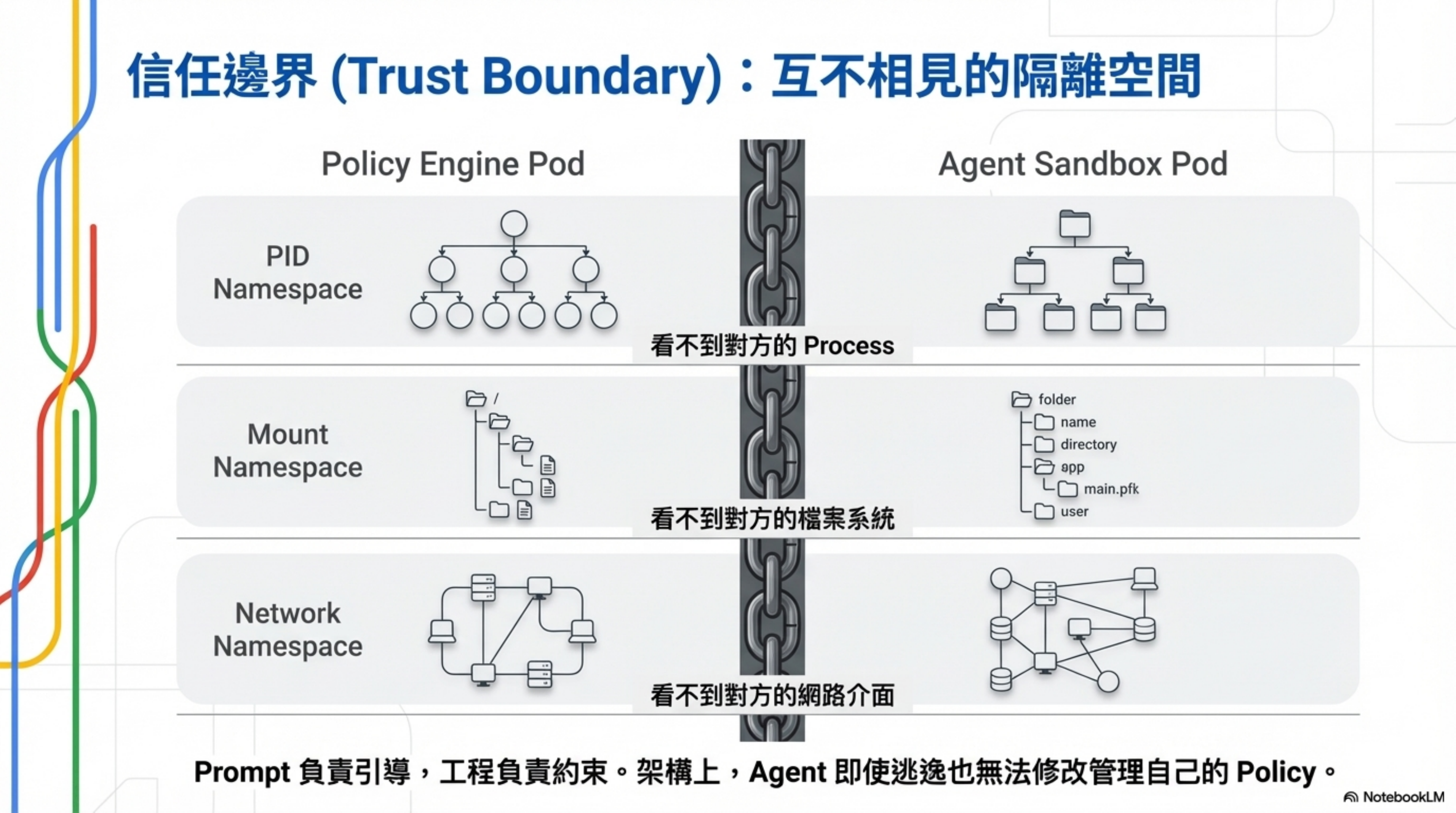
Trust Boundary 設計:Agent 連 Policy 都看不到
這裡有個設計值得特別拿出來講。
Agent 和 Policy Engine 跑在不同的 pod,各自有獨立的:
- PID namespace(看不到對方的 process)
- mount namespace(看不到對方的檔案系統)
- network namespace(看不到對方的網路)
Policy Engine 的資料靠 mount namespace 對 Agent 完全不可見,再加上 Landlock 雙重保護。
這代表什麼?Agent 即使有辦法逃逸到其他 pod,也無法看到或影響管理自己的 policy。 不是靠 Prompt 說「不准改 policy」——是架構上做到不可能。
這就是我一直在講的:Prompt 負責引導,工程負責約束。 NemoClaw 在這個層面做得很到位。
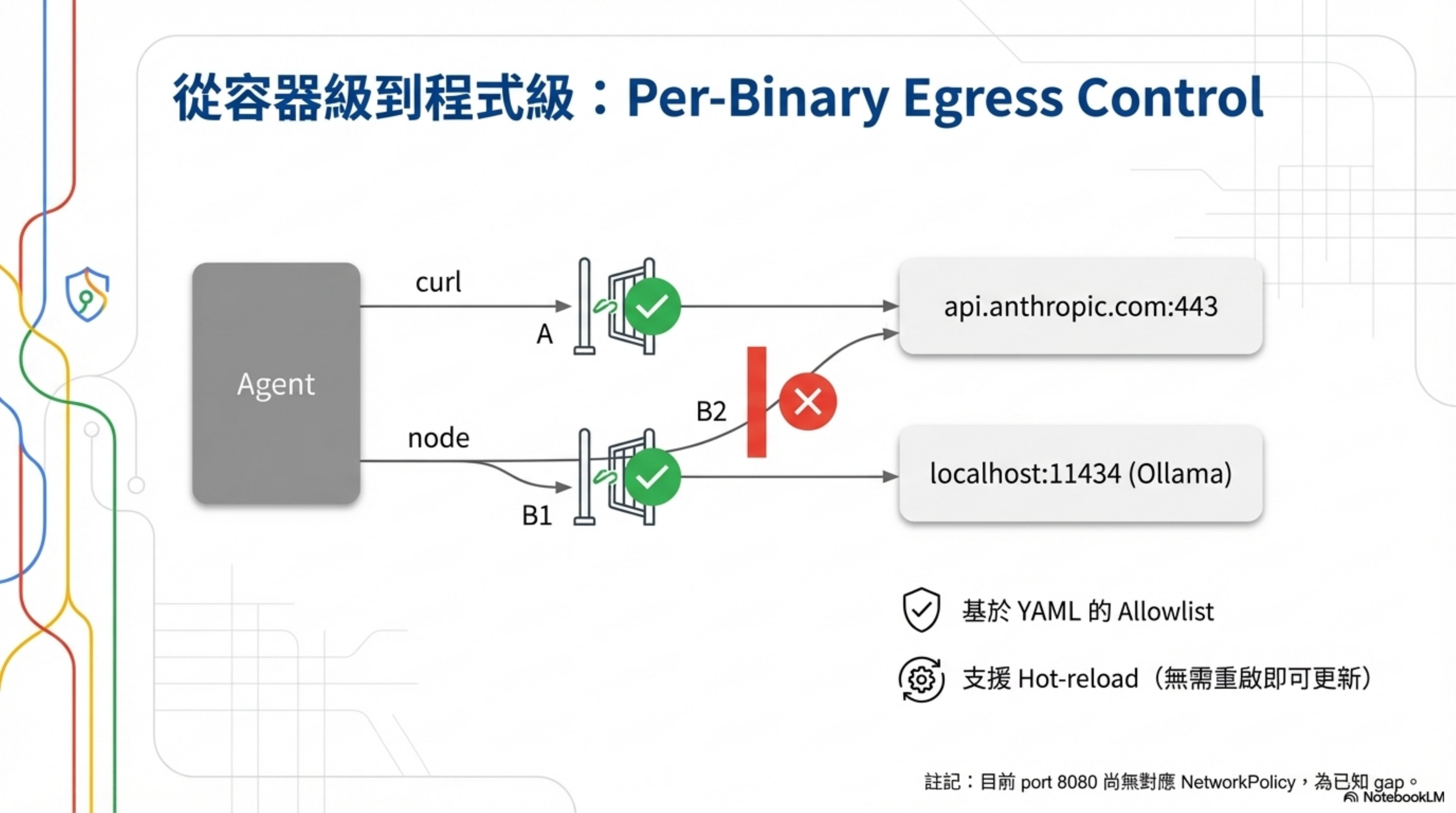
跟 Docker / VM 最大的差異:Per-Binary Egress Control
如果你只用 Docker 跑 OpenClaw(就像我之前做的),你的網路控制粒度是 container 級別——整個容器能不能連外網。
NemoClaw 不一樣。它的 Network Egress Policy 是 YAML 定義的 allowlist,每個 binary 各自有獨立的對外規則。
舉例:你可以讓 curl 只能連 api.anthropic.com:443,但 node 只能連 localhost:11434(本地 Ollama)。不是容器級別的規則,是程式級別的規則。預設的推論模型是 nvidia/nemotron-3-super-120b-a12b,透過 Privacy Router 統一路由。
而且 policy 支援 hot-reload——不需要中斷 Agent 就可以更新 policy。
(補充:目前 port 8080 還沒有對應的 NetworkPolicy,這是一個已知的 gap。)
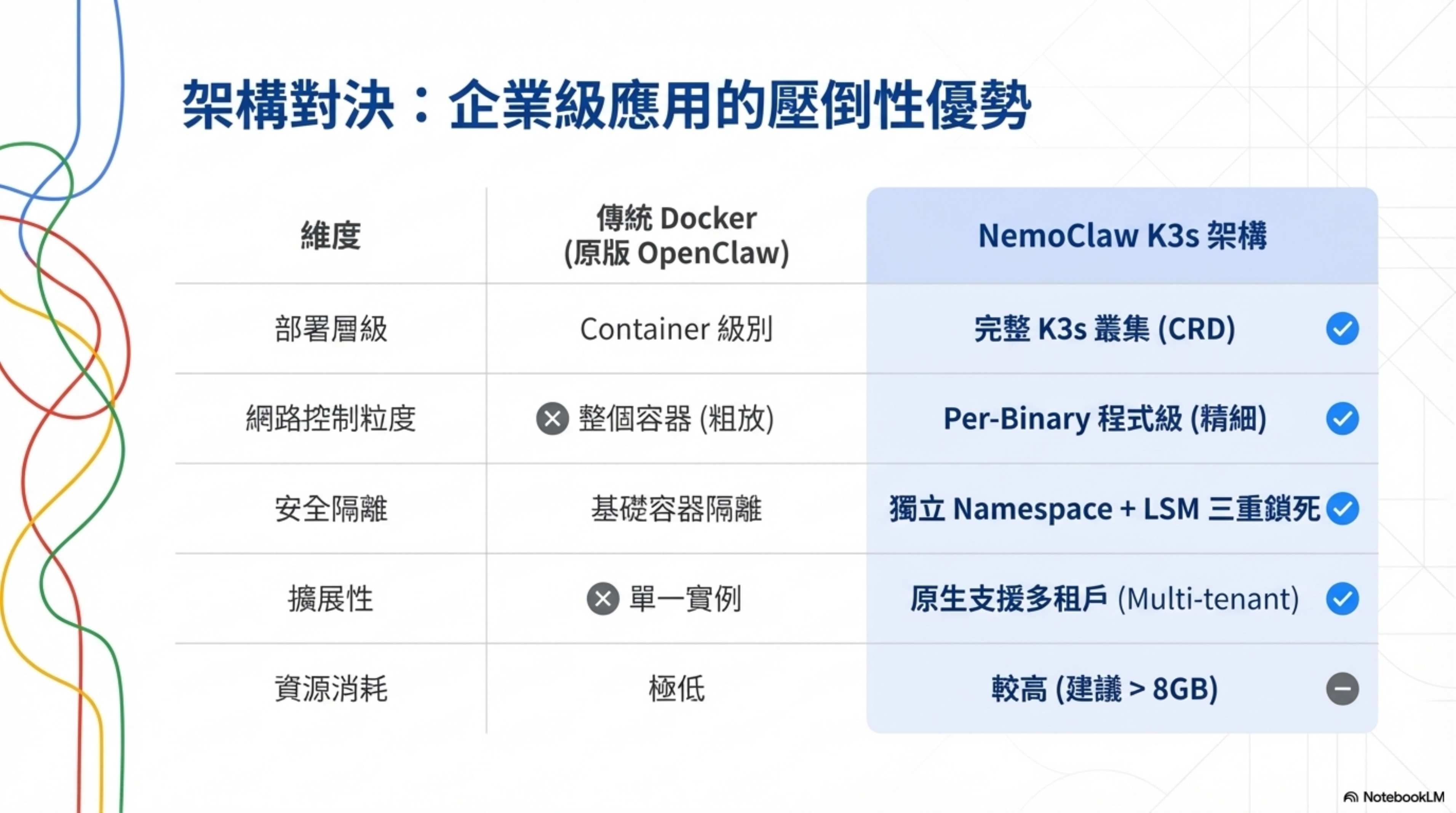
代價:記憶體和複雜度
坦白說,這套架構不是免費的。
K3s cluster + 三層安全機制 + 獨立的 Policy Engine pod = 記憶體消耗會比原版 OpenClaw 高不少。建議至少 8GB 以上。
如果你只是個人用途、一隻龍蝦、信任自己的網路環境——原版 OpenClaw 可能就夠了。
但如果你是企業,跑多個 Agent、處理敏感資料、需要合規——這個 overhead 完全值得。K3s 的好處是天生支援 multi-tenant,多加幾個 Agent 進去不需要動 infrastructure,對平行擴展很方便。Sandbox pod 是透過 Kubernetes CRD 管理的,在 agent-sandbox-system namespace 底下,架構上就是為了多 Agent 而設計。

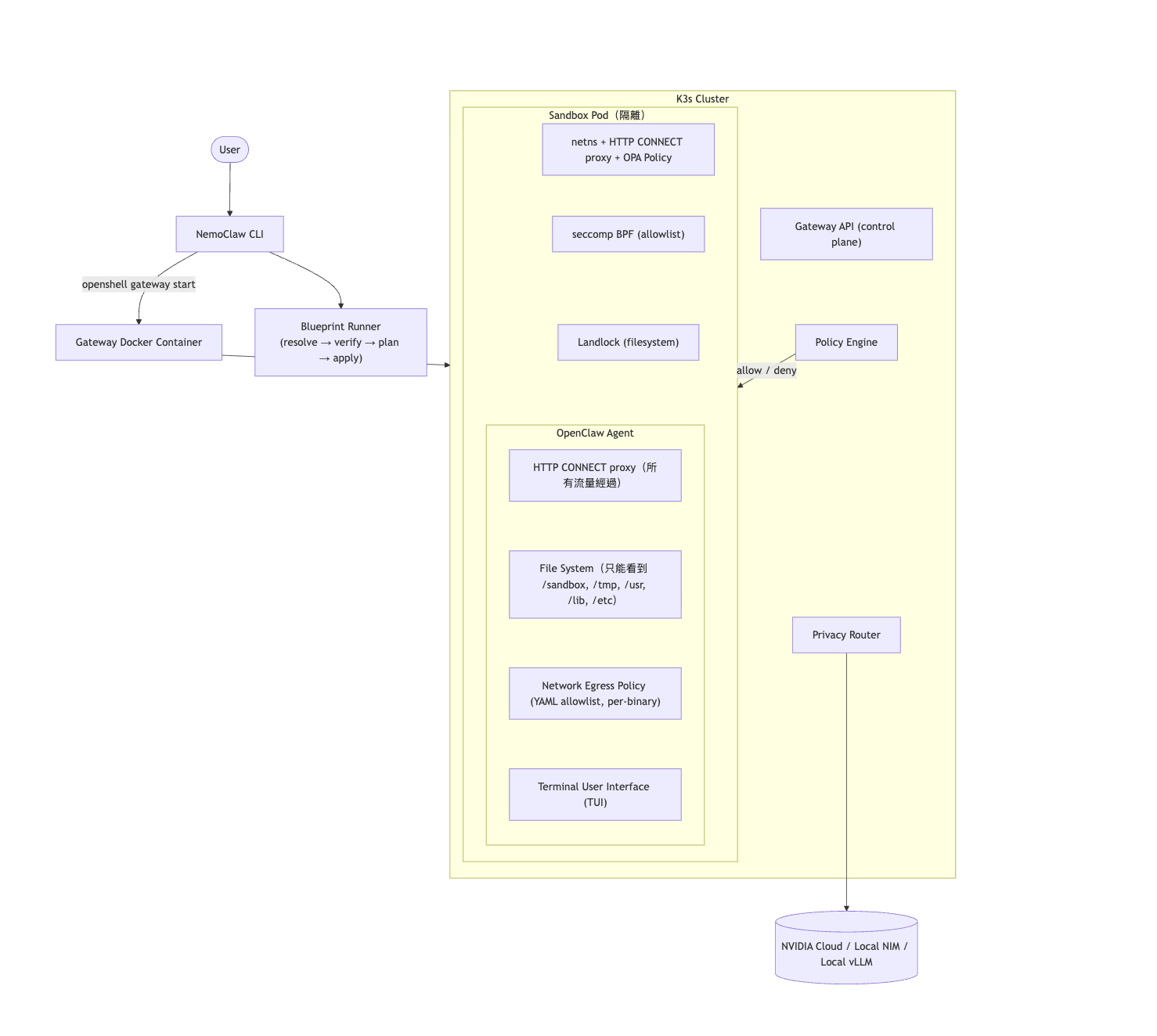
架構圖速讀

1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
User → NemoClaw CLI → Blueprint Runner (resolve → verify → plan → apply)
↓
Gateway Docker Container
↓ openshell gateway start
K3s Cluster
├── Gateway API (control plane)
├── Policy Engine ──── allow/deny ────→ Sandbox Pod
├── Privacy Router ───────────────────→ NVIDIA Cloud / Local NIM / Local vLLM
│
└── Sandbox Pod(隔離)
├── netns + HTTP CONNECT proxy + OPA Policy
├── seccomp BPF (allowlist)
├── Landlock (filesystem)
│
└── OpenClaw Agent
├── HTTP CONNECT proxy(所有流量經過)
├── File System(只能看到 /sandbox, /tmp, /usr, /lib, /etc)
├── Network Egress Policy (YAML allowlist, per-binary)
└── Terminal User Interface (TUI)